MapReader
What is MapReader?
MapReader is a open-source python library for exploring and analyzing map images at scale.
It contains two different pipelines:
Classification pipeline: This pipeline enables users to fine-tune a classification model and predict the labels of patches created from a parent image.
Text spotting pipeline: This pipeline enables users to detect and recognize text in map images.
MapReader was developed in the Living with Machines project to analyze large collections of historical maps but is a generalizable computer vision tool which can be applied to any images in a wide variety of domains.
Overview
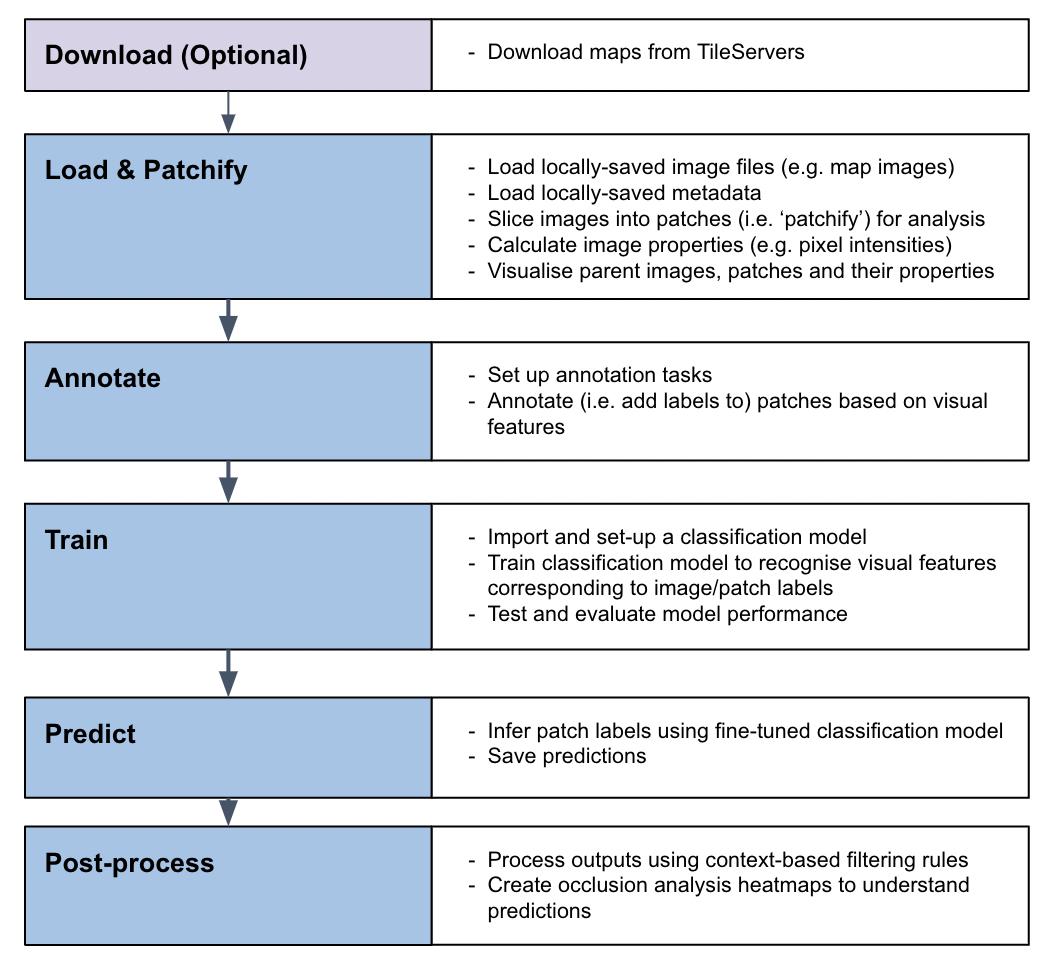
MapReader classification pipeline
The MapReader classification pipeline enables users to train a classification model to recognize visual features within map images and to identify patches containing these features across entire map collections:
MapReader text spotting pipeline
The MapReader text spotting pipeline enables users to detect and recognize text in map images using a pre-trained text spotting model:

Documentation
The MapReader documentation can be found at https://mapreader.readthedocs.io/en/latest/.
New users should refer to the Installation instructions and Input guidance for help with the initial set up of MapReader.
All users should refer to our User Guide for guidance on how to use MapReader. This contains end-to-end instructions on how to use the MapReader pipeline.
Developers and contributors may also want to refer to the API documentation and Contribution guide for guidance on how to contribute to the MapReader package.
Stay in touch
All users are encouraged to join our community! Please refer to the Community and contributions page for information on ways to get involved.
Join our Slack workspace! Please fill out this form to receive an invitation to the Slack workspace.
What is included in this repo?
This repository contains everything needed for running MapReader.
The repository is structured as follows:
mapreader/: Contains the source code for the MapReader library.docs/: Contains the documentation for the MapReader library.tests/andtest_text_spotting/: Contains the tests for the MapReader library.
What is not included in this repo?
Our worked examples can be found in the mapreader-examples repository.
We also have a number of other MapReader and map related repositories which can be found on the maps-as-data GitHub organisation page.
How to cite MapReader
If you use MapReader in your work, please cite:
Our JOSS paper - to acknowledge the software irrespective of the version you used.
Our Zenodo record - to acknowledge the specific version of the software you used (or use the “Cite all versions?” option if your specific version isn’t there).
Optionally, our SIGSPATIAL paper to acknowledge the development of the software and the research behind it.
Acknowledgements
This work was supported by Living with Machines (AHRC grant AH/S01179X/1), Data/Culture (AHRC grant AH/Y00745X/1) and The Alan Turing Institute (EPSRC grant EP/N510129/1).
Living with Machines, funded by the UK Research and Innovation (UKRI) Strategic Priority Fund, is a multidisciplinary collaboration delivered by the Arts and Humanities Research Council (AHRC), with The Alan Turing Institute, the British Library and the Universities of Cambridge, East Anglia, Exeter, and Queen Mary University of London.
Maps above reproduced with the permission of the National Library of Scotland https://maps.nls.uk/index.html
Contributors
 Katie McDonough 🔬 🤔 📖 📆 👀 📢 ✅ |
 Daniel C.S. Wilson 🔬 🤔 📢 📖 |
 Kasra Hosseini 💻 🤔 🔬 👀 📢 |
 Rosie Wood 💻 📖 🤔 📢 ✅ 👀 🚧 🔬 |
 Kalle Westerling 💻 📖 🚧 👀 📢 |
 Chris Fleet 🔣 |
 Kaspar Beelen 🤔 👀 🔬 |
 Andy Smith 💻 📖 🧑🏫 👀 |
 Adam Cox 💻 ⚠️ |